1��������PLC��PNPݔ���Ͱ����ŷ���NPNݔ��Ć��}��
��Փ���ֵĉ��Ѷ����f�ù���������O�ܰ�PNP��ݔ���D(zhu��n)�Q��NPN�����ǣ�
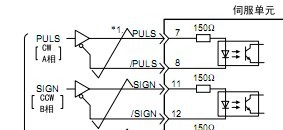
�����ļ��g(sh��)���V�ҡ�ֱ�ӷ��^���ӣ�����7�_��+24V��8�_���}�_���ij�7�_���}�_��8�_��com����Ȼԭ�����ӵ�2.2K���ʽ�ٲ��˵ġ��Ҳ�֪�����@���f�Č�������
ͬ�r���T�ӵļ��g(sh��)���V�қ]�k�����F(xi��n)��Ҫô�����ŷ��(q��)�ӵ�ݔ����ʽ��Ҫô���Q��CPU224XPSI�����ᵽ�D(zhu��n)�Q�Ć��}�����f��һ���ܱ��C���Σ������@Ҳ��������PLC�����Ć��}��ָ��PNP�D(zhu��n)�Q��NPN�Dz����·����
�ھW(w��ng)�ϲ鵽�f�ŷ��(q��)�Ӄ�(n��i)�����p������Ԓ�����Բ��Å^(q��)����ؓ�����@�ӵ�Ԓ�Dz��Dz�Փ��PNP߀��NPN��������ԭ���ǷN7�_��+24V��8�_���}�_�ķ���������
�������Ӿ��D
2��λ�ÿ��ƶ�λָ���
���փԡ��鉯�ѵİl(f��)���l(f��)�F(xi��n)ƫ����λ����?q��)���MAP�죬�����댍�F(xi��n)�Ĺ��ܺ���λ����?q��)����Ì��F(xi��n)����֪��MAP����Խ�Q����Ո��b�n�̣���r���£�
������CPU226����2��׃λ�C���LjA���\�Ӳ��ǽz�ܣ��]����EM253ģ�K��Q0.0��Q0.1���}�_ݔ����Q0.2��Q0.3�քe��2���S�ķ�����λ����?q��)���Ԓ��ֻ�ܽoQ0.0����Q0.1�O(sh��)��һ����?q��)����������ڌ��H�^���У���Ҫ�õ��Σ������f����һ�����D(zhu��n)90�ȣ�����һ�Εr�g�������Ҫ�����D(zhu��n)60�ȣ���ɺ��ٷ�����λ����ʼλ�ã���
�ҵ���˼����λ����?q��)����ڌ�Q0.0�O(sh��)���͛Q�����������D(zhu��n)�Ƕȣ��������^�m(x��)�����P(gu��n)��Q0.0����?q��)��ˣ���ʲô������Q�@�����}�أ�ֻ���Լ�����ָ���ˆ�
 �����W(w��ng)����31010802001143̖
�����W(w��ng)����31010802001143̖

