兩個(gè)變頻器兩個(gè)編碼器做角度同步控制問題?
工程說明:
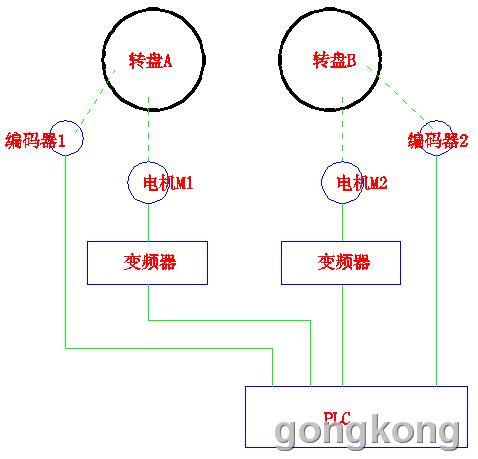
兩異步電機(jī)分別驅(qū)動(dòng)轉(zhuǎn)盤A、轉(zhuǎn)盤B連續(xù)旋轉(zhuǎn)。轉(zhuǎn)盤A轉(zhuǎn)一圈編碼器1也轉(zhuǎn)一圈發(fā)1000個(gè)脈沖,轉(zhuǎn)盤B轉(zhuǎn)一圈編碼器2也轉(zhuǎn)一圈發(fā)出1000個(gè)脈沖
要求1、 在聯(lián)動(dòng)狀態(tài)下,轉(zhuǎn)盤A跟隨轉(zhuǎn)盤B達(dá)到角度同步效果(比如轉(zhuǎn)盤B轉(zhuǎn)到300°轉(zhuǎn)盤A也轉(zhuǎn)到300°,當(dāng)然是有允許偏差范圍的)
2、在聯(lián)動(dòng)剛啟動(dòng)時(shí),兩轉(zhuǎn)盤都要先找到原點(diǎn)位,才可以聯(lián)動(dòng);停止時(shí),兩轉(zhuǎn)盤也要停到原點(diǎn)位。
3、編碼器都有接A、B、Z相,以便于對(duì)原點(diǎn)位及消除累積偏差。
我的思路是,通過比較編碼器1跟編碼器2的偏差值經(jīng)過PID運(yùn)算輸出控制轉(zhuǎn)盤A達(dá)到隨動(dòng)跟蹤目的。但是做程序的時(shí)候要消除累積誤差就要在Z相到來時(shí)對(duì)計(jì)數(shù)值進(jìn)行清零,這樣就會(huì)出現(xiàn)PID的輸入偏差值會(huì)發(fā)生突變,出現(xiàn)系統(tǒng)不穩(wěn)點(diǎn)。
希望大蝦,給小弟指點(diǎn)一下。有樣例的最好發(fā)個(gè)樣例。謝謝大蝦們幫我指點(diǎn)。.郵箱:49427670@QQ.com
補(bǔ)充說明:其實(shí)我這個(gè)工程對(duì)角度同步的要求不是很高的,只要求大致跟上就可以了,但是不能有累積偏差。 [ 此帖被caif02在2013-01-14 17:05重新編輯 ]
 滬公網(wǎng)安備31010802001143號(hào)
滬公網(wǎng)安備31010802001143號(hào)

