�ܶ����֕������@�����}�������ڄ�?c��)��T�ĕr����X���@�ǂ����y�}����Ҳ����(j��ng)�@���J�顣�����@���ӟoһ����ϵ�y(t��ng)���ƵĴ���A(ch��)��������PLC��߀�dž�Ƭ�C��߀�������\�ӿ��ƿ����ȵ�ģʽ����K��ֻҪ��Ҫ�����ŷ����߲��M�M�����D(zhu��n)���ͱ�ȻҪ�漰����̖�����������(q��)��������(sh��)�����_�O(sh��)�ã����������f�����ϵą���(sh��)��������һ��ѣ���֪���{(di��o)�Ă������Լ��}�_�c���H�г̵ı��������f�Ŵ�(sh��)��ͨ�Ľ���X݆�ȵĺ��x�����b�ڴˣ��҂���������ͨ���f�¸��N�ŷ��Լ����M��CN1���ӣ��ֶ���CN1�����(q��)�����cPLC����̖�B�ӣ���νӾ����Լ�Ҫ�{(di��o)���ą���(sh��)��������e�`�ĵط���߀Ո������uָ�������Ǻ�
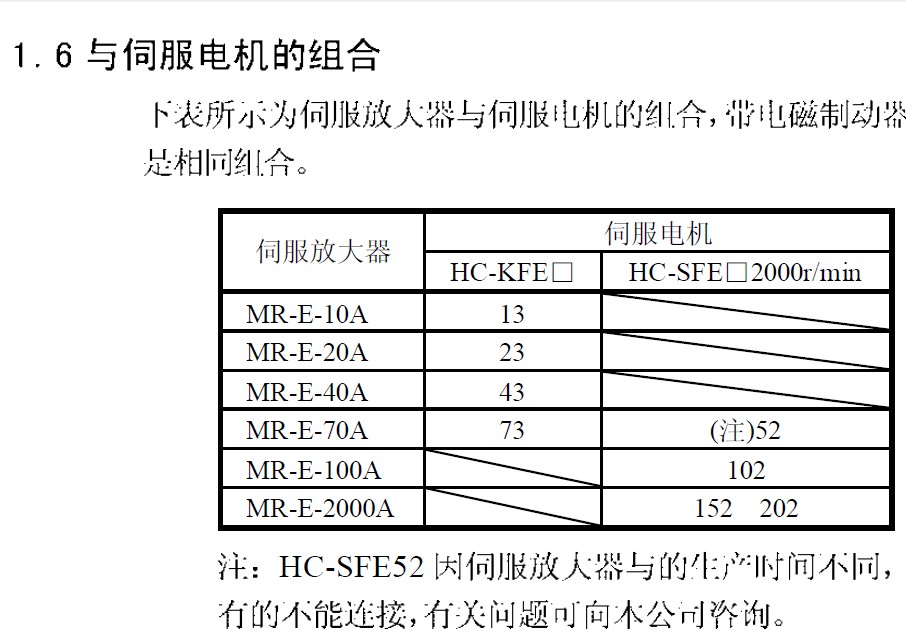
������mr-e-200a-kH003 �@����̖���(q��)�����������S���ҵĂ�������������m(x��)���ϣ������ȣ�Ҫ�ҵ�����(y��ng)�(q��)�������f������Ԕ���IJ鿴ÿһ���h(hu��n)��(ji��)���e���(q��)�����c늙C�Ƿ�ƥ�䡣һ�����(q��)�����f������ǰ�涼�o����ƥ��������(q��)��������(sh��)�O(sh��)���Ҳ���Ђ�ƥ�䅢��(sh��)��
һ��Ҫ�ҵ�����(y��ng)��ƥ�䣬��t�(q��)�����o���R�e�ŷ���߀�Ђ����}�����Ǵ��(q��)�������Ԅәz��늙C���{(di��o)��ƥ�䅢��(sh��)�����Еr������ֵĿ����ǻ��s���f�(q��)�����c�f�ŷ������������ҵ�һ������(sh��)���л֏�(f��)���S�O(sh��)�á������Ѕ���(sh��)ȫ���ص����S��B(t��i)���ُ���һ��һ���{(di��o)����ע�⣬��ͬ�(q��)����������ͬ�ą���(sh��)�O(sh��)�����T�������늱��慢��(sh��)���Ⱥ����һ��Ҫ�������
��ô���@��������䌍��Ҫ������JOG�yԇ�������Ǽ���ææ���_ʼ����̖�������ǰ��(q��)�����Դ���Ӻã����B�ӵ��ŷ���Ȼ��Ѿ��a�����Ӻ�Ҳ�B�ӵ��ŷ����ҵ��(q��)�����f�����е�JOG�yԇ����(sh��)�������f����ָʾ���E���M��JOG�������D(zhu��n)�yԇ�������m���{(di��o)���ٶȡ��������D(zhu��n)�Ƿ������������\���Ƿ��������Л]���s�����ŷ��]�аl(f��)�ᶶ���Լ����ӈ��(q��)����ɢ���L���\�D(zhu��n)�Ƿ������ȣ����f������(q��)�����c�ŷ�ƥ����˛]��Ҳ�ó����Դ���Դ���������a�������a���������ŷ����(q��)�������Dz��ǺõĽY(ji��)Փ�������@�����Ϳ��Է����M����̖���ӵĽӾ������ˡ�
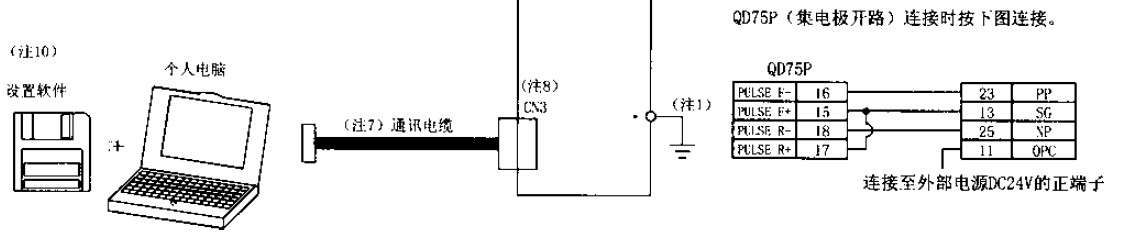
�ڌ��H�����У������x�ŷ��ĕr��͑�(y��ng)ԓ���]�˹��������ǷN����ģʽ�팍�F(xi��n)�����w���ŷ��Ŀ���ģʽ������Ҳ�������Ի�ĵط�������λ�ÿ���ģʽ���D(zhu��n)�ؿ���ģʽ���ٶȿ���ģʽ��ȫ�]�h(hu��n)����ģʽ���_�h(hu��n)����ģʽ�ȵȡ��پ��w�c��λ�ÿ���ģʽ���в�ֻ���늘O�_·��ģʽ���е��ŷ������ֵĸ������D(zhu��n)���c�ٶ�ģʽҲ�м��֡��挦��˶��ģʽ�����������ޟo�I���зN�o�����ֵĸ��X�ɡ��Ǻǡ����@���ҾͲ�Ԕ��ȥ���f���Nģʽ�đ�(y��ng)���ˡ�Ҫ��㶮�@Щ���ȌW��늹��W����·�W����ȥ�҈@�ȾW(w��ng)վ���Y�ϰɡ��F(xi��n)�ھ�������ͨ�ļ�늘O�_·λ�ÿ���ģʽ�����w�f����νӾ����(q��)��������(sh��)�{(di��o)��(ji��)��
���ȣ���Ҫ�ҵ��(q��)�����f�����ϵĽӾ��D�����磺
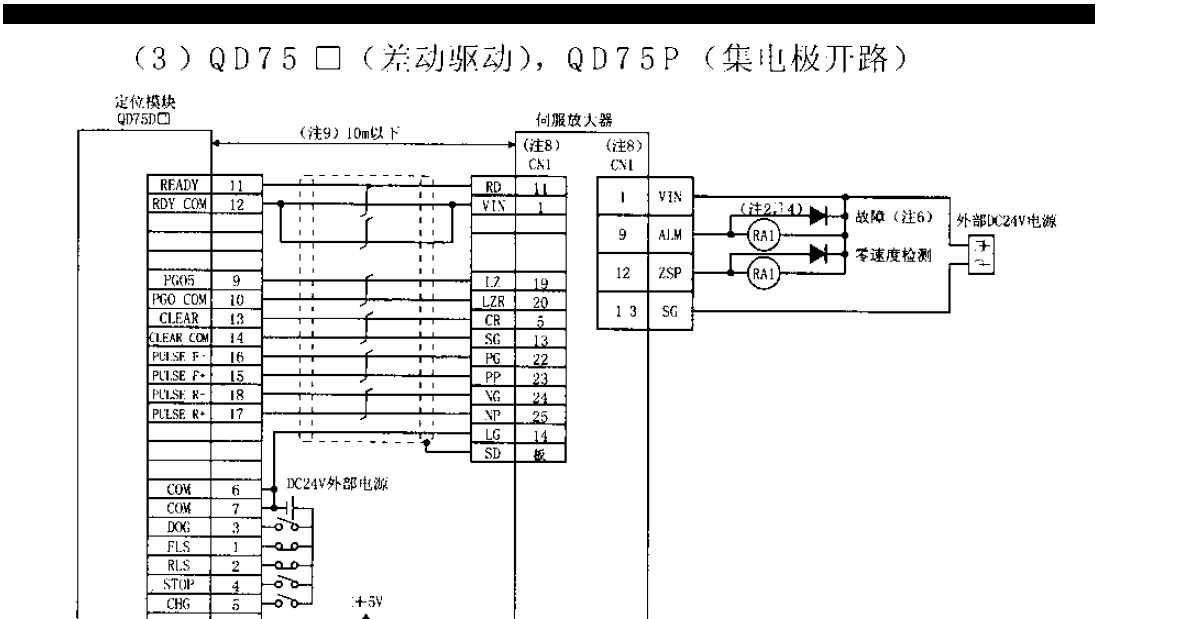

�䌍�������@���D����һ����?c��)��е�ͬ�Ё��f�����ǂ��y�c���@ô���̖���@ô����ӣ�������Щ�����҂���Ҫ�ĵء��䌍���(q��)�����f�����ﶼ�Ќ��T�б����г��˳��ö��ӵij��ù��ܣ����磺


��Ȼ���@����ֻ�ǂ�����B��������߀�и�Ԕ���Ĺ����f���������څ���(sh��)̫�ࡣ�����Ҿ�ֻ�г������Ďׂ���




���ڼ�늘O�_·�أ�����H�H�ǰl(f��)�}�_�ŷ����^����λ����������λ��ʲô�ġ��䌍���@ô�ׂ����Ӿ͉�
SON------��PLCݔ���c��Y7��
VIN--------DC24+
SG--------DC24-
PG--------��PLC��X�S�}�_ݔ����Y0��
PP--------1��2ǧ�W��1/4�ߣ����-------DC24-
NG--------��PLC��X�S����ݔ����Y4��
NP1��2ǧ�W��1/4�ߣ����-------DC24-
�����е��(q��)������(n��i)���ṩ��DC24+���ǿ��Ԍ���(n��i)��24+ݔ���c�Դ������ֱ�Ӻ������������Ӿ��أ���Ҫ���H����ȥ�ӣ�Ȼ����PLC���S�㌑���l(f��)�}�_��ָ�����ʹ�ܵ�ָ��\���¾�֪�����}�������ˡ��@��Ͳ�Ԕ������ˡ����������ŷ��Ӿ�����ͬС���������@�ׂ��������Ӱ���
�P(gu��n)������X݆�ȵ�Ӌ�㣬������߀����o��Ԕ���v���µģ����ҿ����˸���(㑽ܹ���)��Ԕ���Ľ�ጣ�Ҳ�Ǽ҈@��ţB���ﰡ���Ҹ����ϵ�ַ�����Լ������ɡ�
http://m.le-linge.com/read-gktid-143193.html��ô����ͨ�ž����ú��B��PLC�����Ҝyԇ��PLC�l(f��)�}�_���\���ˡ���Ҫ�м��{(di��o)��(ji��)�(q��)��������(sh��)�ˡ����@���Ҵ������eһ��Ҫ�{(di��o)��(ji��)�ą���(sh��)��
��1������ģʽ��Ҫ�x������Ҫ��ģʽ��һ�����λ�ÿ���ģʽ��
��2��SONʹ�ܙC���x���е��ŷ��ṩ�ˎN�ŷ�ʹ��ģʽ��
��3��늙C���D(zhu��n)�����O(sh��)��������(j��)���H������Ҫ�O(sh��)�����D(zhu��n)������
��4��ؓ�d�T���ȣ��@���������ց��f���_ʼ��Ĭ�J���S�O(sh��)�ã�������F(xi��n)��ؓ�d�\�Ќ���(y��ng)ij�������m���{(di��o)��(ji��)�����Ђ����ӱ��^�ƌW���U�������Ӌ�㣬�Լ�ȥ����
http://m.le-linge.com/read-gktid-143723.html��5�������O(sh��)�����@���DZ��^���{(di��o)�ģ��Լ�ȥ�����ɣ�
��6���}�_��ʽ�������}�_+��̖�����D(zhu��n)+���D(zhu��n)��AB��ȣ�
��7���}�_߉����߉��ؓ߉��
��8������X݆���ӣ�����X݆��ĸ
Ҫ�f��Ҫ����(sh��)�����@Щ�ˡ��@���ٸ���һ������A4�ŷ��ĽӾ��D��Ҳ�Ǽ҈@ijͬ���ṩ�ģ�Ҳ���ԅ����¡�

[ ������chinazhu6666��2012-04-02 10:16���¾� ]
 �����W(w��ng)����31010802001143̖
�����W(w��ng)����31010802001143̖

