參數配置如圖。

程序是手冊里的例程。
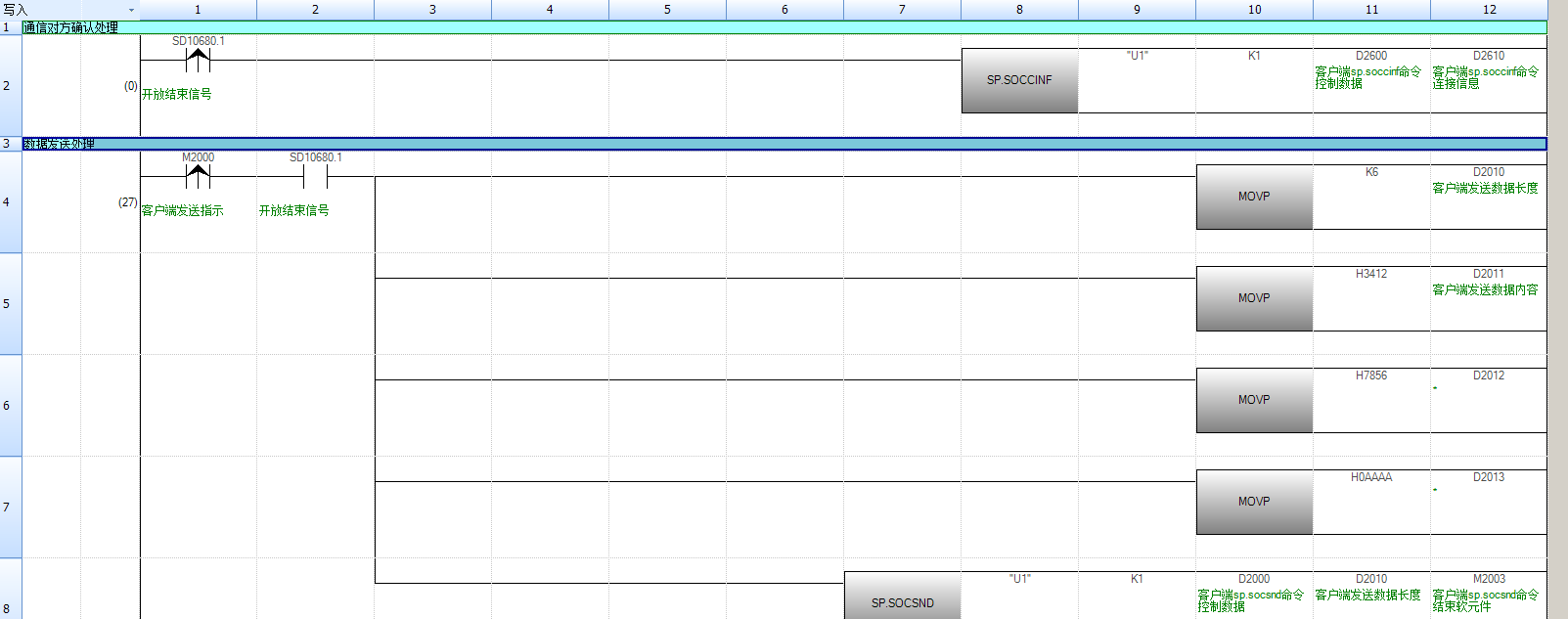


與no.2設備通信時,用調試助手發現可以連接得上,sd10680.1接通。
但是置位M2000發送時數據會出現c1b1的報警,接收也會出現c1b1報警。
手冊里的內容,C1B1H 指定連接的開放處理未結束。 處理方法,進行開放處理,并在開放結束后進行通信。

plc作為服務器只是偵聽,被動等待鏈接,不需要像客戶端那樣主動要求連接。
有個問題,上圖參數配置中,plc與no.2設備連接時,plc是作為服務器,no.2設備是作為客戶端吧?
20200114
no.2設備連接改為用unpassive方式,和調試助手連上了,無論收發都會出現上述報警。
終于找到問題了。還是自己沒有仔細看好手冊,沒有對指令理解好。

上述指令通道2時應該選擇k2,而不是k1,該參數的取值范圍是從k1~k8。我一開始以為指令輸入參數中的“u0”就可以表示通道了,其實這個也是錯的。
為什么報錯指定連接的開放處理未結束,其實就是我一直對通道1進行操作,而通道1中plc是作為客戶端的,需要主動連接。
這也解釋中間遇到其他因為這個錯誤而造成的現象。
1:中間遇到如果no.1設備連上后,那么與no.2設備進行連接后通信收發是不會報錯的,no.1連上后,已經打開完成了,no.2程序中使用收發指令不會出現開放處理未結束報警。
2:當no.1和no.2都連上后,與no.2的數據發送都出現在no.1中。
感謝給予幫助的網友!
[ 此帖被勤工儉學在2020-01-14 10:47重新編輯 ]
 滬公網安備31010802001143號
滬公網安備31010802001143號

