1:步進馬達開機回原點
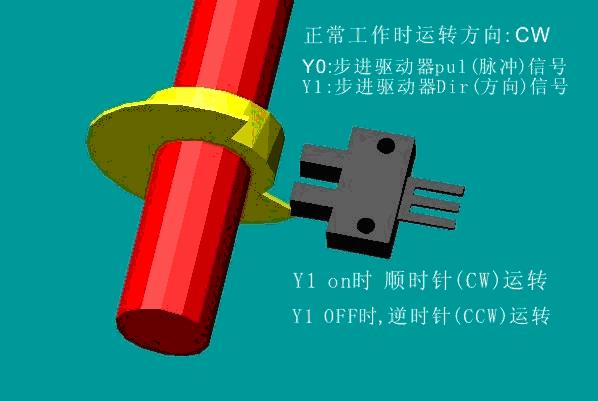
說明: 正常工作時的運行方向是:順時針方向(CW)
Y0: 步進驅動器脈沖信號(PUL)
Y1: 步進驅動器方向信號(DIR)
Y1 ON時,順時針(CW)運轉
Y1 OFF時,逆時針(CCW)運轉
X1 ON:光電傳感器處于遮光狀態
原點位置所示:
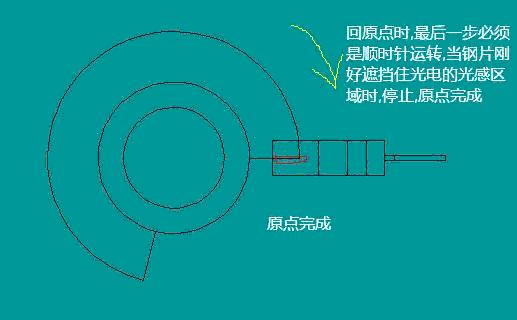
回原點時,最后一步必須是順時針運轉,當鋼片剛好遮擋住光電的光感區域時,感應器輸出信號,馬達停止運轉,原點完成。原點完成后運轉方向不用變更,因為馬達正常工作時也是順時針運轉
由于關閉電源后,可能由于一些外在因素,馬達轉過一定角度,這樣就不在原點處,所以開機需對馬達回原點
馬達回原點時首先判斷條件,分為兩種,一種是光電處于遮光狀態,即X1為ON,別一種是光電處于入光狀態,X1為OFF,
如圖:
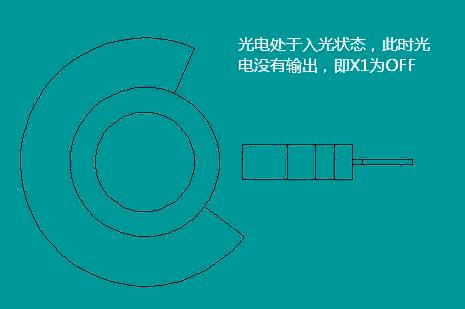
光電處于入光狀態

光電處于遮光狀態
本人用的步進指令STL做的,感覺很笨,請教各位高手有什么其它好的方法,望分享經驗!不勝感激!
 滬公網安備31010802001143號
滬公網安備31010802001143號

